- Published on
It's All in the Hips: Why Humanoid Robot Designs Are Converging on a Specific Joint Configuration
- Authors

- Name
- The Editorial Team
- @humanoidsdaily
TL;DR: A growing number of humanoid robot developers are converging on a specific hip joint configuration: Flexion–Abduction–Rotation (F-A-R). Once dominated by A-R-F, the shift reflects a balance between better mechanical packaging, longer stride potential, and modern actuator capabilities. While Tesla’s Optimus sticks with A-R-F, most second-gen bots from Figure, Unitree, and others now favor F-A-R for its engineering advantages. Hip joint order—though subtle—has a big impact on real-world performance and design viability.
This article takes it's inspiration and analysis from this brilliant podcast by Marwa ElDiwiny @MarwaEldiwiny and guest Scott Walter @GoingBallistic5. It is also available on Spotify
This thread has the original analysis.
It's All in the Hips: Humanoid Robot Design Converges on Key Joint Configuration
Humanoid robots captivate the public imagination, but beneath the sleek shells lie complex engineering challenges. One critical area is the hip joint, fundamental for locomotion and stability. Recent analysis by Scott Walter @GoingBallistic5 on X/Twitter (and in the podcast above!) suggests a trend among leading developers, moving away from early designs towards a specific hip configuration, driven by a complex interplay of mechanical trade-offs.
Decoding Hip Movements
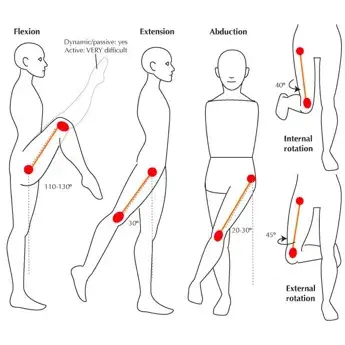
Understanding robot hips requires precise terminology. Borrowing from biomechanics, key movements are:
- Flexion/Extension (F): Swinging the leg forward and backward.
- Abduction/Adduction (A): Moving the leg sideways, out or in.
- Rotation (R): Twisting the leg, pointing toes inward or outward.
Most humanoid robots don't use a single ball-and-socket joint like humans. Instead, they typically employ three separate actuators (motors) stacked in a serial chain, each responsible for one type of movement (F, A, or R). While mathematically any order of rotation can achieve the same orientation, the physical sequence significantly impacts engineering design, particularly component packaging and load distribution.
The Rise of 'F-A-R'
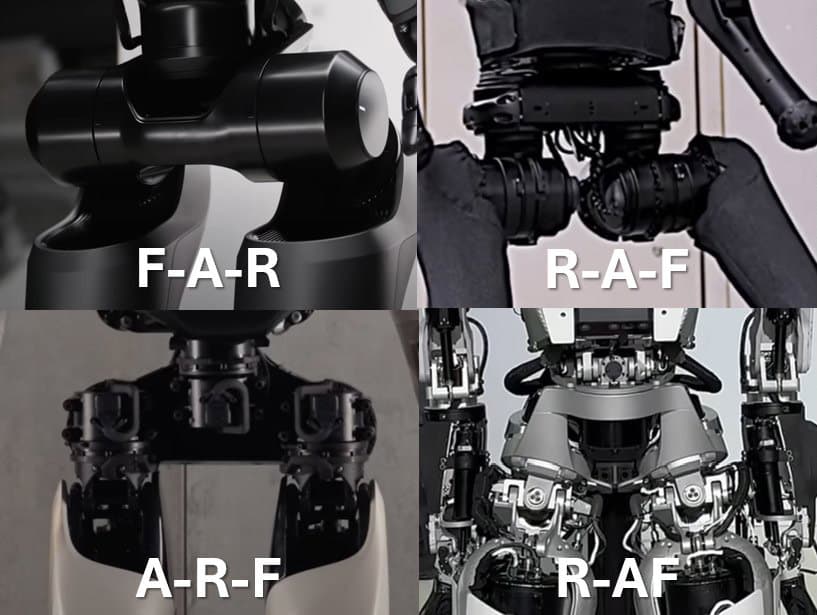
Analysis of prominent humanoid robots reveals several hip configurations have been attempted, primarily denoted by the order of movement they facilitate: F-A-R, A-R-F, R-AF (Rotation first), and a parallel R-A-F variant used by Sanctuary AI (Apollo) and XPeng.
Interestingly, a noticeable shift has occurred between robot generations. While the 'A-R-F' (Abduction-Rotation-Flexion) configuration was popular in many first-generation prototypes, the 'F-A-R' (Flexion-Abduction-Rotation) design now dominates current and second-generation models from companies like Figure (Figure 02), Unitree (G1), and PNDBotics. Tesla's Optimus is a notable exception, retaining its A-R-F hip design across generations.
Why the migration? The initial logic favoring A-R-F often aimed to place the flexion actuator (typically requiring high torque) last in the chain. This minimizes the mass (the other two actuators) it has to move during leg swings. However, this often results in the flexion pivot point being lower relative to the robot's torso.
The now-preferred F-A-R configuration flips this. Placing flexion first allows the main forward/backward pivot to be positioned higher, potentially enabling a longer stride and improving overall body proportions (e.g., allowing for a longer torso relative to leg length). Crucially, F-A-R also lends itself to cleaner mechanical packaging. The rotation actuator can often be integrated neatly down into the upper leg, and the primary flexion actuator high in the hip assembly. The abduction actuator fits between them, sometimes forming a structure resembling anatomical buttocks.
This improved 'engineering elegance' – easier cable routing, better component integration, and potentially more natural proportions – seems to outweigh the theoretical benefit of reduced carried mass for the flexion joint in A-R-F. Advances in actuator technology, offering higher torque density, likely make carrying the subsequent actuators less of a concern than it once was, further tipping the scales towards F-A-R.
Unexplored Territory and Future Directions
The analysis also highlights configurations seemingly ignored by major developers, particularly those placing Flexion second (e.g., R-F-A, A-F-R). These might present insurmountable packaging challenges or offer no clear mechanical advantage, though it remains an underexplored design space. Companies like 1X Technologies, using unique cable-driven actuation, further complicate direct comparison, though their hip configuration is speculated to align with the F-A-R trend.
This convergence on F-A-R hips doesn't mean design is settled. Optimus's persistence with A-R-F and the existence of parallel mechanisms show alternative approaches remain viable. Furthermore, hip design doesn't exist in isolation; it influences and is influenced by waist and even shoulder configurations. The industry's approach to waist joints, for example, appears far less converged, suggesting design choices there are more tightly coupled to specific intended applications.
As humanoid robots continue their march towards commercial viability, these fundamental design choices in areas like the hip joint will remain critical, balancing mobility, efficiency, and the sheer complexity of replicating human movement.